
Portfolio Details
Project information
- Category: Professional
- Place: Hochschule Coburg
- Project date: 01 July 2025
- Project URL: No URL Yet
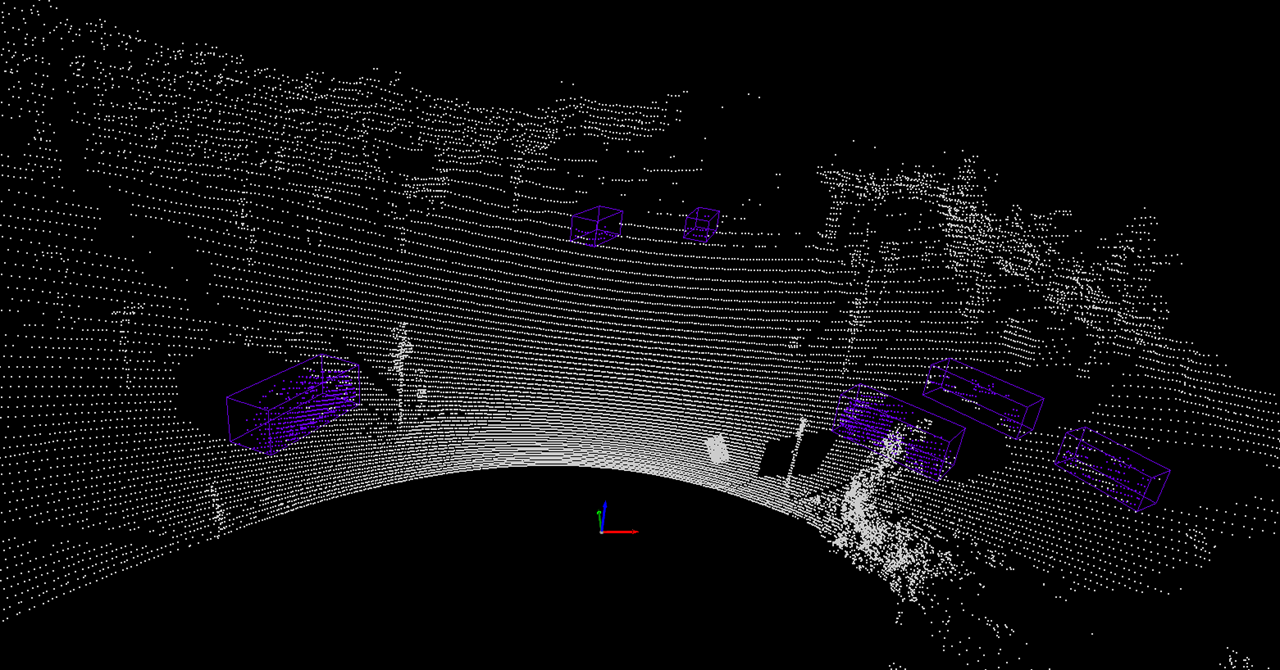
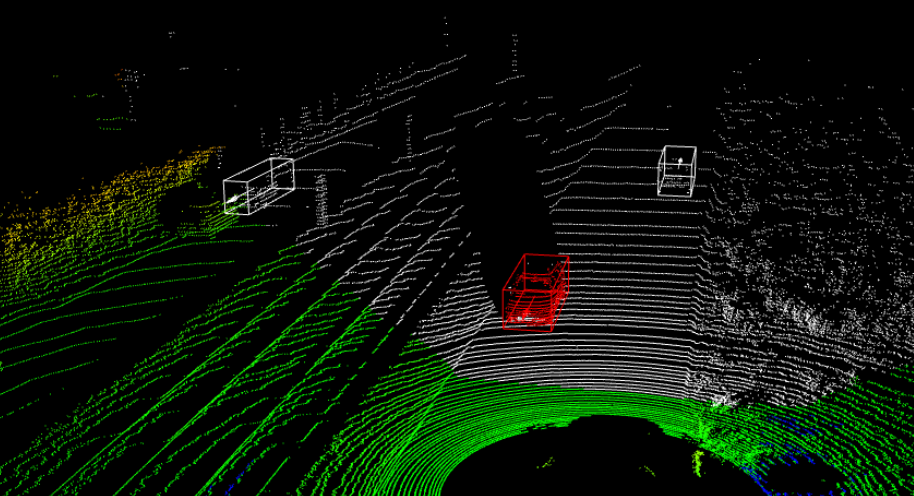
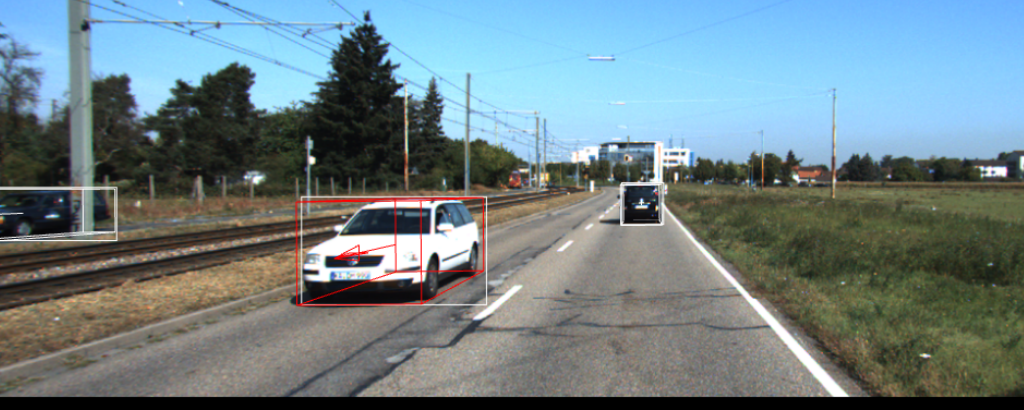
3D Object Detection and Sensor Fusion for Autonomous Driving in the DEKOR-X Project
As part of the DEKOR-X project on autonomous and connected driving, this work focuses on long-term stable 3D object detection using Lidar and camera sensors under varying weather conditions. It involves designing and deploying a perception system at a real intersection, including sensor procurement, calibration (intrinsic and extrinsic), and installation. A custom data collection pipeline was developed to create a novel fusion dataset for 3D object detection. The project emphasizes Lidar-based perception, complemented by camera data, to handle domain shifts effectively. Additionally, state-of-the-art detection algorithms like PointPillar were trained and fine-tuned on the collected dataset.