
Portfolio Details
Project information
- Category: Professional
- Place: Hochschule Coburg
- Project date: 01 November, 2025
- Project URL: https://github.com/tui-abdul/3d_lidar_camera_calib
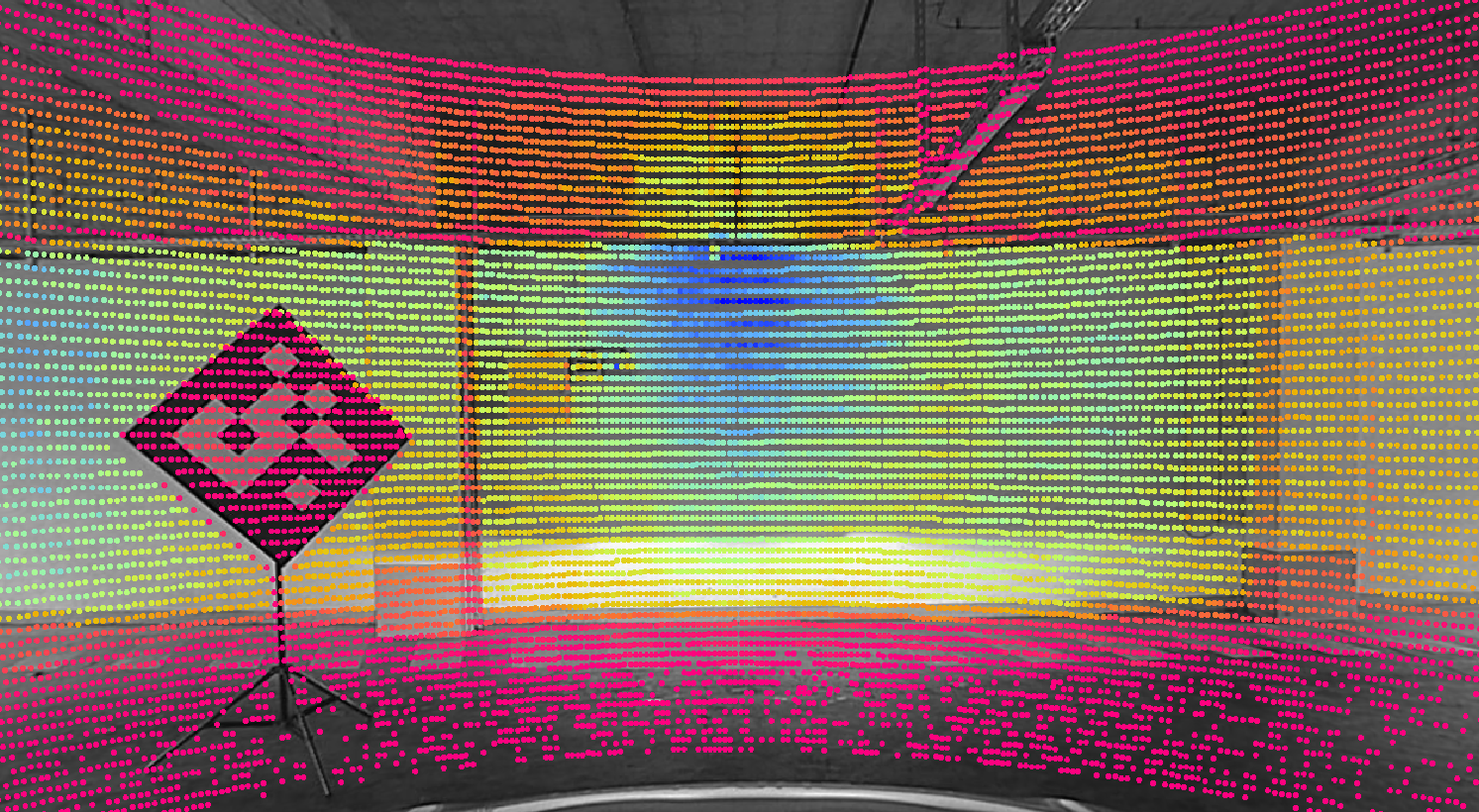
3D LiDAR Camera Calibration
Two Ouster LiDARs and four Basler GigE cameras were deployed to capture complementary sensor data. In autonomous driving, LiDAR and camera sensors offer unique strengths, and their integration requires precise extrinsic calibration. This work uses an interactive, target-based calibration tool that employs ArUco markers to align 3D LiDAR points with camera pixels. The open-source tool achieves sub-pixel reprojection accuracy and supports both high and low-resolution sensors. More details and code are available at: https://github.com/tui-abdul/3d_lidar_camera_calib. [1]